Reglamento de la categoría
Robotracer
Definición de Robotracer
Robotracer es una categoría de competición robótica. También se le llaman “Robotracers” a los robots que participan en la categoría “Robotracer”. Un Robotracer (robot), es un vehículo eléctrico autónomo en pequeña escala, cuyo objetivo es recorrer un escenario establecido bajo reglas estandarizadas, en el menor tiempo posible.
Para cumplir este objetivo el Robotracer (robot), tiene hasta cinco oportunidades o tres minutos (lo que termine primero), para recorrer el escenario, donde se suele utilizar la primera chance
para adquirir la mayor cantidad de información posible del escenario y de esta forma, en las oportunidades posteriores, optimizar el recorrido del Robotracer, y disminuir el tiempo en completar el circuito.
La categoría Robotracer, es una competencia experimental que tiene por objetivo que las y los desarrolladores robóiticos desarrollen sus propios robot, exponiéndose a las problemáticas de la miniaturización de los
vehículos eléctricos autónomos en pequeña a escala.
Reglamentación de la categoría Robotracer
1 – Reglas para los Robots:
[1-1] El robot debe ser autónomo. Excepto por la operación para dar inicio a la carrera del robot, no se permite ninguna operación externa, alámbrica o inalámbrica.
[1-2] El robot no debe tener ningún cambio en el hardware o el software durante el transcurso de la competición del participantes Se permiten reparaciones y ajustes menores, que los jueces determinarán o no como válidos.
[1-3] El tamaño del robot tiene un límite. No debe superar los 25 cm de largo, 25 cm de ancho, ni 20 cm de alto.
[1-4] Se permiten mecanismos de succión para aumentar la fuerza de contacto con el suelo.
[1-5] El robotracer no agregará fuerza adhesiva excesiva a las ruedas para aumentar la fuerza de contacto con el suelo, que pueda poner en peligro la integridad del escenario, el/la operador/a o cualquier persona o
instalación de la competencia.
2 – Reglas para a pista:

[2-1] La superficie de la pista será negra, y el recorrido, será un circuito indicado por líneas blancas con un ancho de 20 mm. La longitud total de la línea será de máximo 60 m.
[2-2] El trazado consistirá en una combinación de líneas rectas y arcos de circunferencia. Las líneas podrán cruzarse.
[2-3] El radio de curvatura de los arcos en la pista será como mínimo 10 cm. Además, la distancia entre los puntos de cambio de curvatura serán como mínimo 5 cm.
[2-4] Cuando las líneas se crucen, el ángulo de cruce será de 90 grados ±5 grados. (Como se muestra en la figura 1) 10 cm antes y después del punto de intersección de las líneas, las líneas serán rectas.
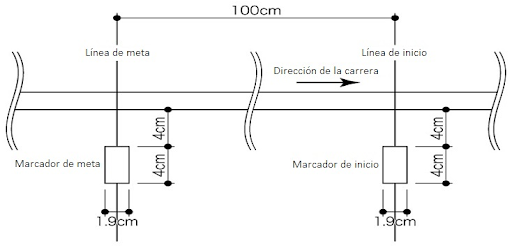
[2-5] La zona de meta, estará delimitada por dos “marcas” (desde ahora “hits” ubicados a la derecha del sentido de la carrera, separadas por 1 metro. (Ver Figuras 2 y 3)
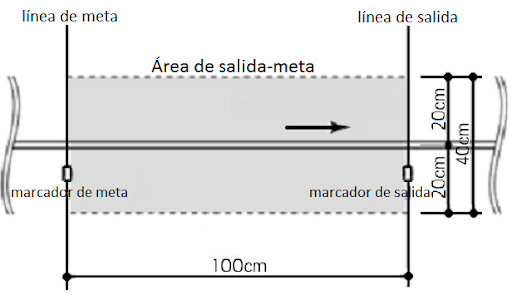
[2-6] Se colocará un arco en el inicio y en la meta, que tendrá 20 cm de ancho y 12.5 cm de alto.
[3-6] Antes de la meta, y después de la salida, el tramo será recto por al menong>
[2-7] Luego de que se muestre el escenario a los competidores estos no podrán cargar ningún tipo de información de este a los Robotracers. Durante la ronda, el operador no tendrá permitido cambiar información sobre
el recorrido usando un switch o algo de ese tipo.
[3-9] Los competidores tienen prohibido tocar a los Robotracers a menos que tengan la autorización de un árbitro.
[[3-12 El árbitro tiene el derecho de preguntar al competidor sobre su Robotracer, también puede detener una vuelta, declarar descalificación, o pedir instrucciones.
[3-11] Los premios y los criterios de evaluación serán establecidos individualmente en cada competencia.
En cada cambio de curvatura habrá una marca lateral a la izquierda (ver figura 4)
Los marcadores de esquina no se superponen con otros marcadores de esquina.

[2-9] La superficie de carrera de la pista será normalmente horizontal, pero puede haber pendientes parciales de hasta 5 grados.
[2-10] El borde exterior de la pista (así como el borde de la plataforma) estará al menos a 20 cm del centro de la línea.
3 – Reglas generales de la competencia
[3-1] La proyección del Robotracer con respecto al escenario debe estar siempre sobre la línea a seguir. Si sale por completo se considerará como vuelta inválida.
[3-2] Cada competidor tiene 5 minutos y un máximo de 5 intentos durante ese tiempo.
[3-3] Por cada intento, el robotracer debe partir desde el área de meta en la dirección especificada.
[3-4] Después de terminar, el Robotracer debe detenerse por al menos 2 segundos en el área de meta.
[3-5] El recorrido más rápido será considerado como el tiempo oficial.
[3-6] El tiempo de la vuelta empezará a correr cuando el sensor de inicio detecte al Robotracer y terminará cuando el sensor de finalización lo detecte, además, el cuerpo entero del Robotracer debe estar dentro del área de meta, si esto no sucede el tiempo no será medido.
[3-7] Si el Robotracer se apaga, se sale de la pista, o se queda quieto por más de 2 segundos mientras compite, se considerará como vuelta inválida.
[3-8] Luego de que se muestre el escenario a los competidores estos no podrán cargar ningún tipo de información de este a los Robotracers. Durante la ronda, el operador no tendrá permitido cambiar información sobre
el recorrido usando un switch o algo de ese tipo.
[3-9] Los competidores tienen prohibido tocar a los Robotracers a menos que tengan la autorización de un árbitro.
[3-10] El árbitro tiene el derecho de preguntar al competidor sobre su Robotracer, también puede detener una vuelta, declarar descalificación, o pedir instrucciones.
[3-11] Los premios y los criterios de evaluación serán establecidos individualmente en cada competencia.
Observaciones
1.- El competidor tiene prohibido cargar programas o reemplazar la memoria ROM durante la competencia, tampoco puede enviar ningún tipo de información al Robotracer a través de consolas de desarrollo UNIX u otro programador independiente de la unidad Robotracer.
2.- El competidor tiene permitido limpiar el polvo de las ruedas del Robotracer usando cinta adhesiva o similar, sin embargo, tiene prohibido el uso de solventes químicos que pueden ser usados con el objetivo de aumentar la fricción.
3.- Después de dar como iniciada una vuelta, si el Robotracer no puede pasar de la línea de inicio, igualmente será considerada como una vuelta.
4.- Después de que el Robotracer haya completado la vuelta, este debe detenerse automáticamente, si no lo hace, la vuelta será considerada como inválida.
5.- Exceptuando la carrera, los competidores tienen prohibido posicionar sus Robotracers fuera del área de meta con el propósito de ajustar parámetros.
6.- En algunos casos, los arcos de curvatura variables aparecen continuamente.
7.- La pista está hecha de madera terciada pintada de color negro mate. Las líneas están hechas de cinta blanca de 10 [mm] de ancho. El escenario está construido con una precisión humana, por lo que puede haber errores en las dimensiones en cierto punto. Por lo cual, podría haber diferencias en distancia o nivel de aproximadamente 5 [mm] a lo sumo. No se aceptan reclamos sobre el agarre de la superficie.
8.- Los lugares donde se ubican los sensores de inicio y final están indicados en las figuras siguientes. Estos son del tipo infrarrojo y su eje óptico se ubica 1 [cm] por encima del piso.
